Fruit Picker

Autonomous fruit picking by 6 robotic manipulators
The Fruit Picker enables fully autonomous harvesting of semi-spherical fruits in orchards and plantations, using robotic manipulators, computer vision, and precision fruit handling to deliver efficient, damage-free harvesting with consistent performance across the entire harvesting cycle.
100% Autonomous | 100% Electric
The system consists of two key modules:
- 1
The Fruit Distribution Module, installed on the gravity-stabilized platform of Slopehelper, ensuring stable and efficient handling of harvested fruit.
- 2
Harvesting Block, attached to the rear of the base platform, featuring six horizontally shifting robotic manipulators equipped with Computer Vision for fruit detection and harvesting. These manipulators are mounted on a guided sliding frame, which moves vertically up and down to adjust the working area and optimize harvesting efficiency.

Fruit Distribution Module

Harvesting Block
This advanced robotic harvesting solution maximizes productivity, efficiency, and cost-effectiveness, making it a game-changer for modern fruit plantations.

Robotic Automation: How Much Can You Save with the Fruit Picker?
Discover the real-life calculation below, based on results from an actual orchard.
The following calculations provide an overview of the time and effort required for harvesting using the Slopehelper and manual picking methods.*
Calculation for Slopehelper is done as follows:
- Calculate the amount of harvest per wave based on the productivity and field area
- Calculate the amount of harvest per row side based on geometry and productivity
- Estimate number of passes through one passage based on the harvest size and bin capacity
- Calculate harvesting time based on the fruit picker productivity and the amount of harvest
- Calculate travel distance without harvesting based on number of passes, length of the row and length of harvested
- Calculate travel time
- Calculate time required for harvesting a passage based on harvest time, travel time, unloading time and row change time
Calculate for manual picking is done as follows:
- Calculate the amount of harvest per wave based on the productivity and field area
- Calculate the harvesting time based on the amount of workers, workers productivity and amount of harvest
- Calculated the additional time based on the geometry of plantation and rotation time
Create your own calculation using your field data and actual conditions.
Features & Benefits
The Fruit Picker uses six robotic manipulators combined with computer vision to identify, reach, and harvest fruit across the canopy without manual intervention.
Key benefits:
• Fully autonomous harvesting process
• Continuous operation without manual picking
• High harvesting consistency
• Scalable productivity per machine
Result: reliable, high-throughput harvesting with minimal human intervention.
Each manipulator replicates the movement and dexterity of a human hand, enabling controlled gripping and detachment of fruit.
Key benefits:
• Controlled picking motion
• Reduced bruising and damage
• Stable grip during detachment
• High picking accuracy
Result: gentle harvesting with preserved fruit quality.
The Fruit Picker can be equipped with specialised picking modules depending on the crop. The harvesting system remains the same, while the end-effectors are adapted to the detachment and handling requirements of each fruit type, such as apples or citrus.
Key benefits:
• One harvesting system for multiple fruit types
• Crop-specific picking modules
• Adapted detachment method for each fruit
• Consistent harvesting quality across applications
Result: precise and fruit-appropriate harvesting with a single robotic platform.
Harvested fruit is transported and distributed into bins using a dedicated distribution module mounted on a stabilized platform.
Key benefits:
• Even fruit distribution inside bins
• Reduced impact during transfer
• No manual handling required
• Continuous harvesting flow
Result: consistent fruit handling with minimized post-harvest damage.
The harvesting module adjusts vertically and horizontally to reach different canopy zones and depths.
Key benefits:
• Access to upper, middle, and lower canopy
• Adaptation to different tree heights
• Extended reach into canopy depth
• Reduced missed fruit
Result: complete canopy harvesting with fewer unpicked fruits.
The system uses computer vision and adjustable parameters to harvest only fruits that meet defined ripeness and size criteria.
Key benefits:
• Harvest only market-ready fruit
• Adjustable size thresholds
• Ripeness-based picking strategy
• Reduced need for post-sorting
Result: higher market quality and improved profitability.
The Fruit Picker is designed to operate in both high-density and conventional orchard structures.
Key benefits:
• No need for plantation redesign
• Adaptation to varying tree spacing
• Compatibility with existing orchards
• Flexible deployment
Result: fast integration into real-world farming conditions.
The Fruit Picker operates entirely on electromechanical systems without hydraulic or pneumatic components.
Key benefits:
• Precise movement control
• Stable and repeatable operation
• Reduced maintenance complexity
• No fluid-based system failures
Result: reliable long-term operation with consistent performance.
The system maintains alignment and stability even on sloped or slippery terrain.
Key benefits:
• Maintains picking accuracy on slopes
• Stable manipulator positioning
• Consistent bin orientation
• Reduced fruit movement during operation
Result: reliable harvesting performance in all terrain conditions.
The Fruit Picker enables continuous harvesting with minimal human involvement, reducing dependency on seasonal labor.
Key benefits:
• Reduced labor dependency
• Continuous operation without breaks
• Predictable harvesting output
• Lower operational variability
Result: significantly reduced harvesting costs and increased operational efficiency.
Technical Specifications
Height
Length
Width
Weight of attachment
Weight with installed attachment
Maximum height of harvesting
Minimum height of harvesting
Maximum depth of harvesting
Maximum slope angle
Number of manipulators
Picking speed
Fruit size
Operation speed
Compatibility
Drive method
Number of belts
Motor
Estimate Your Investment
Calculate Your Savings with Fruit Picker Attachment
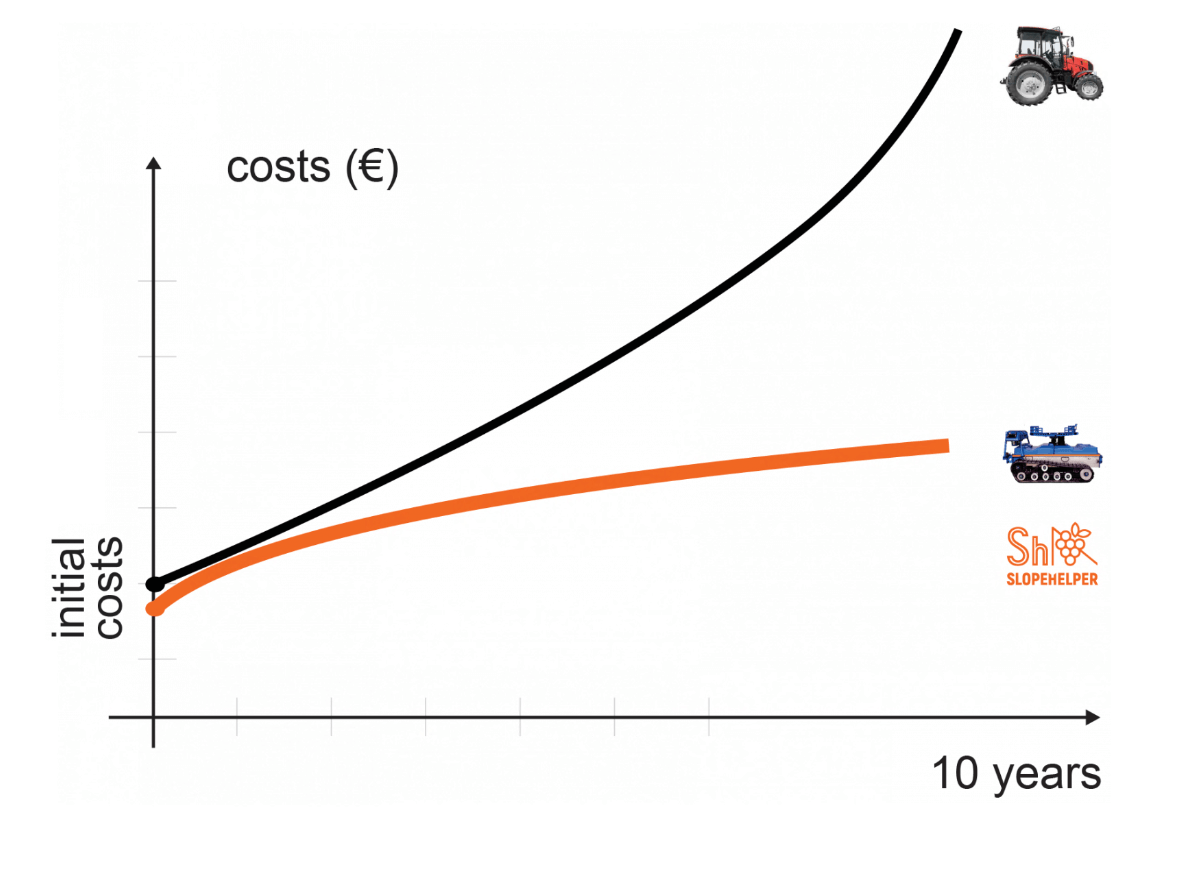
The Slopehelper Autonomous Robotic Agrosystem is a fully electric, low-voltage solution built to transform orchard and vineyard operations. In comparison to traditional tractor-based methods, Slopehelper delivers:
- Up to 3x lower operational costs
- Significantly reduced initial investment
- Fully autonomous performance that reduces labor requirements
With a progressive, cost-efficient approach, Slopehelper ensures long-term savings and operational efficiency.
Use Attachment Fruit Picker in our Feasibility Calculator to estimate your investment and calculate how much you can save.
Smarter, Faster, and More Efficient Than Conventional Harvesting
The Fruit Picker revolutionizes orchard harvesting by efficiently collecting fruit along one side of each tree row. Often, the harvested quantity exceeds a standard bin’s capacity, requiring strategic unloading. Unlike manual platforms, which swap bins mid-row, the Slopehelper Fruit Picker completes the row smoothly—full bins are replaced at the end with a forklift, minimizing downtime and maximizing productivity. With careful planning, growers enjoy higher efficiency, smarter operations, and a faster harvest.
The Limits of Conventional Harvesting
Bin Capacity Limit
Normally the fruits which can be collected on one side of the tree row doesn’t fit into the standard agricultural bin.
End-of-Row Unloading
The only option for unloading the full bin is to drive the machine until the end of the passage, where it can be taken out by a fork lift and replaced by an empty one.
Travel Time Consideration
This movement with a full basket will take time and not contribute to the operation, so the strategy must be selected wisely.
Slopehelper Fruit Picker Saves All the Limits
The Fruit Picker overcomes the limitations of traditional harvesting by minimizing idle travel time and optimizing bin unloading. When the basket is full, the machine efficiently moves to the unloading point and resumes work with minimal disruption. A smart strategy ensures that partially filled bins continue harvesting when appropriate, maximizing overall productivity. The path and sequence of operations are illustrated below.
Fruitpicker Strategy : The optimized path and smart sequence of operations
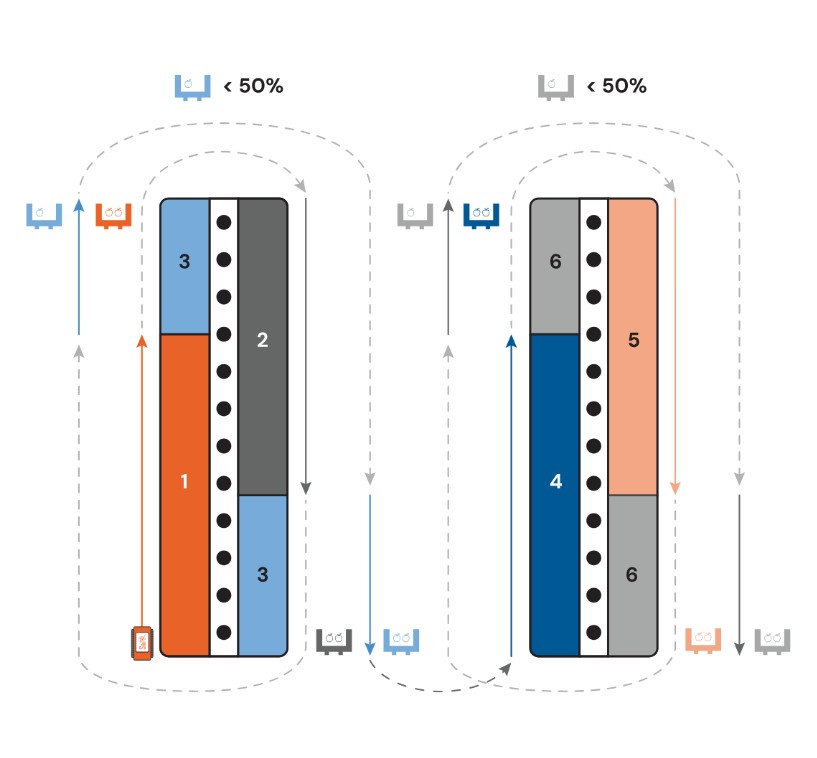
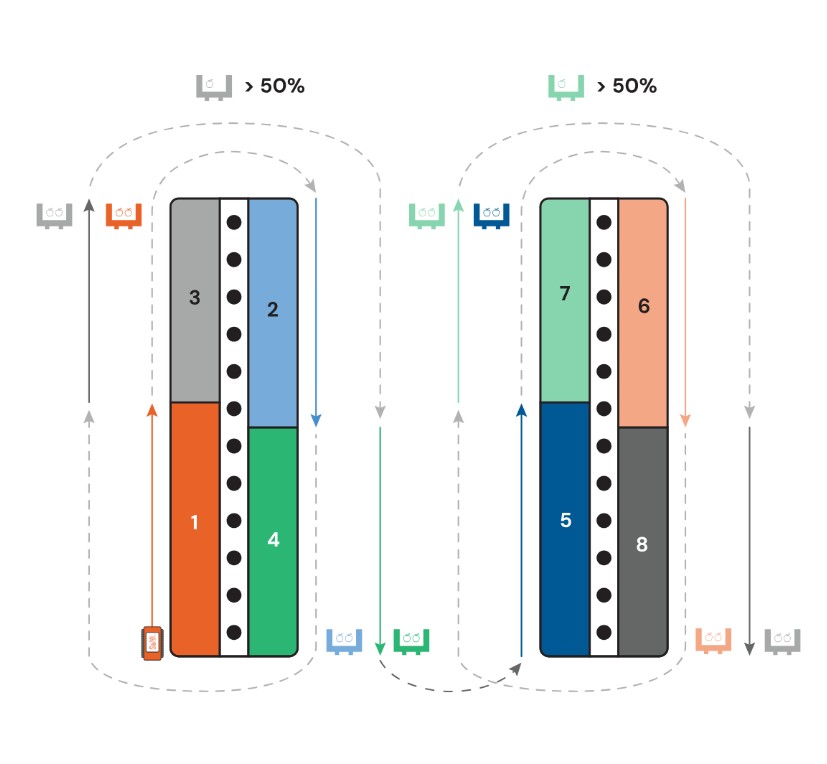
With an optimized path, the machine follows a smart sequence that minimizes non-harvesting travel, ensuring maximum productivity.
- Full Bin Handling: When a bin is full, the Slopehelper moves it directly to the unloading point at the end of the passage. After unloading, it immediately continues harvesting in the next passage of the same row.
- Partial Bin Rule: If a row is completed and the bin is less than 50% full, harvesting continues in the next row without unloading. If over 50%, unloading is requested before moving on.
Experience the Future of Harvesting
Apply for a Slopehelper Fruit Picker demo and see how robotic automation can save time, reduce costs, and boost productivity in your orchard.